

 联系我们
联系我们

伺服使能的工作时序
时间间隔T0根据主电源的状态有所不同
T1为伺服使能与电机励磁之间的延迟时间,为驱动器内部固定时间,T1的值不超过100ms
T2取决于参数设置(P01.08)
T3取决于参数设置(P01.09+10ms)
运行状态指伺服驱动器执行控制指令(位置、速度、转矩)
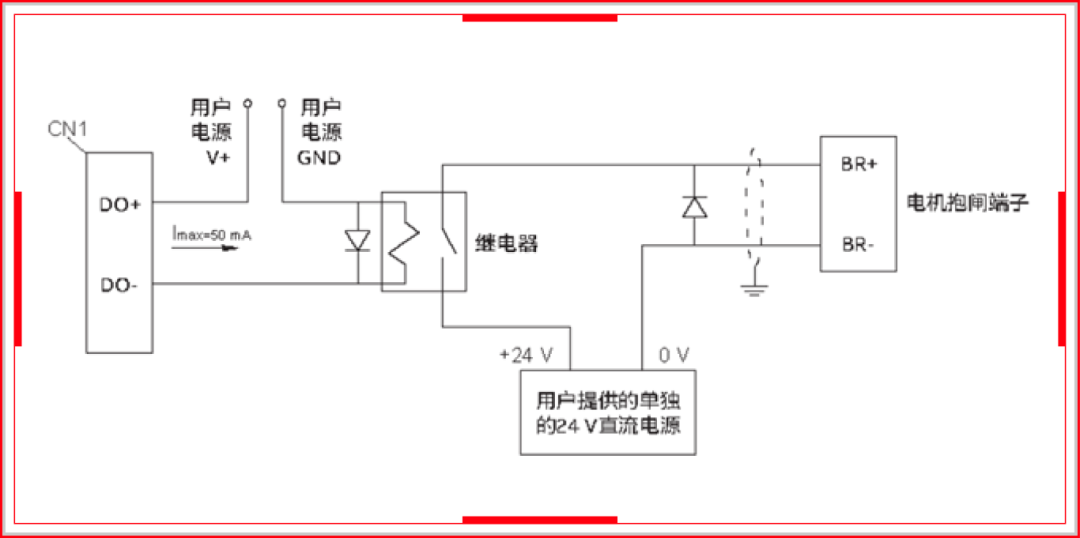
01、电机的抱闸控制
电机抱闸控制,可以用于在E530伺服驱动器处于非运行状态时,禁止伺服电机轴的运动,保持电机的位置锁定,从而确保不会因为自重或外力移动使机械的运动部分发生移动。要使用电机抱闸功能,须将伺服驱动器的一个DO配置为BRK信号,并设置DO端子有效时的输出电平逻辑。
02、电机的抱闸解除时序控制
T1为伺服使能与电机励磁之间的延迟时间,为驱动器内部固定时间
T2为电机励磁就绪与电机抱闸信号输出之间的延迟时间,可通过参数 P01.08设置
T3为电机抱闸信号输出与指令生效之间的延迟时间,可通过参数 P01.09设置,指令生效指来自外部或内部的指令(位置/速度/转矩)被伺服驱动器执行
03、电机抱闸闭合时序控制
在伺服禁能后,电机抱闸可以执行闭合动作。抱闸闭合时序根据电机的状态(电机旋转和电机静止)分为以下两种情况:
①电机旋转时(≥20rpm)的抱闸闭合时序
当伺服禁能后,伺服驱动器开始停机
伺服禁能后,若超过时间T1或电机转速低于V1时,电机抱闸开始闭合
V1通过参数P01.11设定
T1通过参数P01.12设定
T2通过参数P01.10设定
②电机静止时(<20rpm)的抱闸闭合时序
电机须在延迟时间T2结束后解除励磁
- 下一篇:ABB变频器ACS280冷板传动
- 上一篇:ABB变频器对潮湿环境下运用方案
